In this blog, I discussed my experiences of doing a virtual secondment and how we carried out the work online.
Read More »My experience of performing a virtual secondment at LAAS-CNRS


In this blog, I discussed my experiences of doing a virtual secondment and how we carried out the work online.
Read More »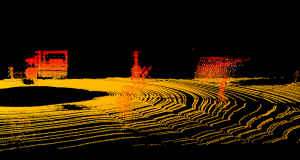
In this blog, the several stages of a conventional LiDAR-based detection pipeline are discussed.
Read More »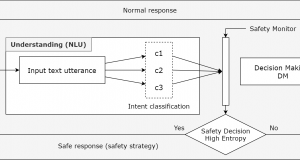
In this blog, I will be discussing how we can compute uncertainty for Deep Learning models which can provide us more confidence in deploying Deep Learning systems in safety-critical domains.
Read More »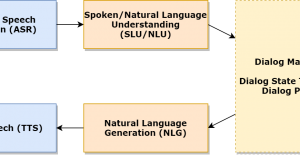
There are many development platforms to assist developers in building a chatbot quickly and efficiently. There is a trade-off of easiness versus control over these frameworks, where closed source is often easier to use while open-source often provides more control. This blog discusses the open-source RASA framework which provides more control over the development and fine-tuning of ML models.
Read More »
The 5th Network Wide Event (NWE) of the European Union MSCA Horizon 2020 project on Safer Autonomous Systems (SAS) took place from 7th of December to the 10th of December 2021.
Read More »
Tips for TurtleBot3 Setup.
Read More »
Neural Networks are state-of-the-art algorithms for image recognition and classification. In our new blog you can read how do these algorithms fit into safety-case scenarios where mistakes can lead to the loss of human life or to the serious damage to the environment.
Read More »
Despite the travel limitations imposed by the COVID-19 pandemic, the online NWE-4 was a great success and a valuable experience for each ESR. they got the chance to interact socially with other ESRs and benefit from the various scientific and soft-skill trainings.
Read More »
Will the wireless communication of future autonomous vehicles be robust against electromagnetic disturbances? What about the continuous wave disturbance?
Read More »
For autonomous vehicles (AV) to perform at par with human ability, we first need to understand human driving behaviour. For simplification, human driving tasks can be broken down into two categories of tasks, i.e., the ‘what tasks’ and the ‘how tasks’, together referred to as the orthogonal tasks. The driving task under the ‘what category’ can be further broken down ...
Read More »