In the previous blog parts, the motivation behind and basic information about the two protocols were given.
Read More »A series of wireless communication technology in agricultural vehicles. Part III: Protocol’s test

In the previous blog parts, the motivation behind and basic information about the two protocols were given.
Read More »
In the previous blog, we covered IOLW – the technology that can break the ice in wireless technology in the agricultural sector by providing its reliable star-topology network working in the 2.4 GHz ISM band. However, it is not the solely available technology. This blog will introduce a meshed technology, namely SmartMesh IP.
Read More »
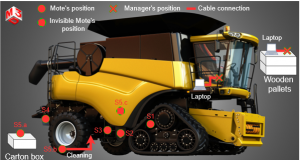
It is not a secret that wireless technologies have already conquered our daily life but what about other aspects of our life and what about the industry? There are multiple examples of new wireless technologies coming in different industrial fields like drones assistance in line stringing or even telesurgery. The agricultural industry also adopts new technologies. In this series of ...
Read More »
For pathfinding and collision avoidance, many methods have been proposed. In this article, I would like to share a classical approach, graphic search, which is very interesting and has been applied in many fields. This article will introduce the family and braches of graph search and give an insight into how it works in collision avoidance.
Read More »
An autonomous surface vehicle (ASV) can reduce the number of sailing accidents caused by human error. In addition, onboard crew expenses are greatly reduced. The collision avoidance (CA) algorithm, as one key part of an autonomous ship, however, is always an intractable problem in terms of real-time, robustness, and rule compliance. How to deal with the massive uncertainties and complexity ...
Read More »
The simulation-based testing procedure of autonomous systems generally includes the generation, simulation, and analysis phases. This blog post will give an overview of these phases, how they are connected, and an example of how to use them to perform testing of an autonomous system. This post does not pretend to be exhaustive, and the goal is to give a brief ...
Read More »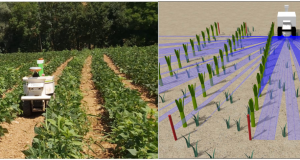
Or 5 criteria to select your simulator! Figure1. An agricultural robot in the field and in simulation. Source: Naïo Technologies [14]. Autonomous systems have to be tested to validate their software and functions. They can be tested in the field or in simulation, but field-testing is costly and time-consuming. Hence, simulation-based testing is an increasingly popular approach for their validation. ...
Read More »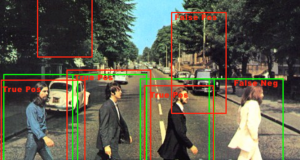
With the increasing introduction of ML techniques into the different applications of autonomous driving systems (ADSs), the resulting safety concerns have raised more attention. Due to the known vulnerability of ML techniques in an open environment [1], the prediction results of Object Detector (OD) are sensitive to some characteristics but not limited, such as object size, weather, occlusion, etc. Among ...
Read More »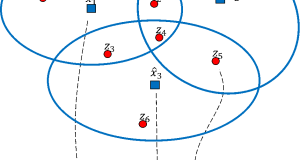
Multi-Object Tracking (MOT) is an important but intractable problem in tracking scenes using sensors like radar, lidar, camera, etc. MOT is usually the prerequisite for subsequent collision avoidance modules in autonomous driving or sailing. Correct collision avoidance will be impossible if the target is lost or wrongly tracked.
Read More »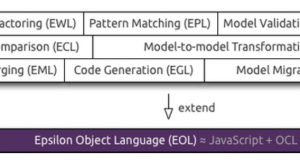
Assurance Cases (ACs) are methods to justify system confidence in essential properties such as safety, reliability, etc. But the manual generation of AC is time-consuming and prone to errors. Also, AC update during the entire system life cycle calls for more labour. Thus, Model-based Engineering (MBE) techniques are well exploited for an automatic process of AC generation. We propose an ...
Read More »