



In the previous blog parts, the motivation behind and basic information about ...
Read More »-
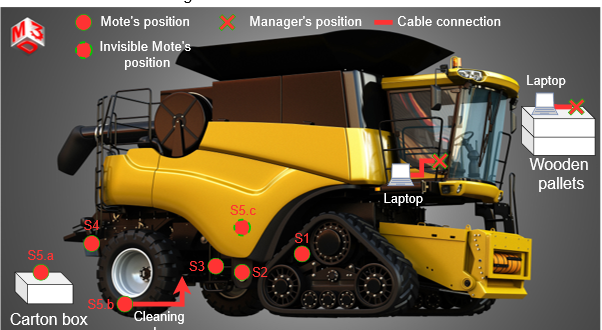
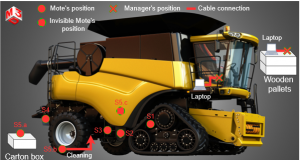
A series of wireless communication technology in agricultural vehicles. Part III: Protocol’s test
In the previous blog parts, the motivation behind and basic information about the two protocols were...
-
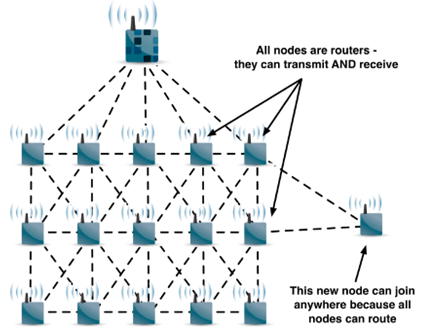
A series of wireless communication technology in agricultural vehicles. Part II: SmartMesh IP
In the previous blog, we covered IOLW – the technology that can break the ice in wireless technology...
-

A series of wireless communication technology in agricultural vehicles. Part I: IOLW
It is not a secret that wireless technologies have already conquered our daily life but what about o...
-

Graph search algorithms in pathfinding and collision avoidance
For pathfinding and collision avoidance, many methods have been proposed. In this article, I would l...
-
Introduction of the collision avoidance methods of autonomous ships
An autonomous surface vehicle (ASV) can reduce the number of sailing accidents caused by human error...
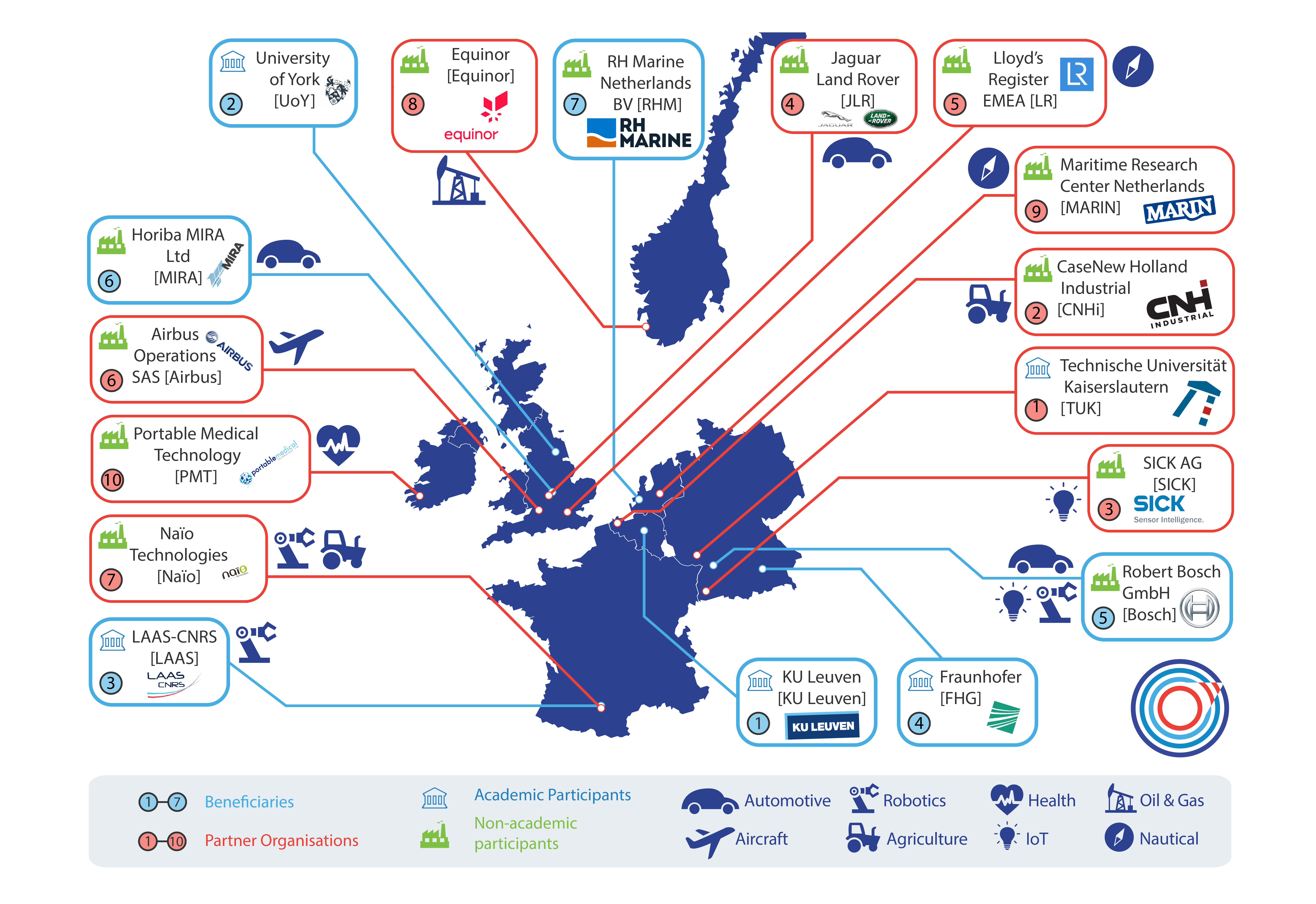
SAS - SAFER AUTONOMOUS SYSTEMS
The coming of autonomous systems doesn’t just mean self-driving cars. Advances in artificial intelligence will soon mean that we have drones that can deliver medicines, crew-less ships that that can navigate safely through busy sea lanes, and all kinds of robots, from warehouse assistants, to search-and rescue robots, down to machines that can disassemble complex devices like smartphones in order to recycle the critical raw materials they contain. As long as these autonomous systems stay out of sight, or out of reach, they are readily accepted by people. The rapid and powerful movements of assembly-line robots can be a little ominous, but while these machines are at a distance or inside protective cages we are at ease. However, in the near future we’ll be interacting with “cobots” – robots intended to assist humans in a shared workspace. For this to happen smoothly we need to ensure that the cobots will never accidentally harm us. This question of safety when interacting with humans is paramount. No one worries about a factory full of autonomous machines that are assembling cars. But if these cars are self-driving, then the question of their safety is raised immediately. People lack trust in autonomous machines and are much less prepared to tolerate a mistake made by one. So even though the widespread introduction of autonomous vehicles would almost eliminate the more-than 20,000 deaths on European roads each year1, it will not happen until we can provide the assurance that these systems will be safe and perform as intended. And this is true for just about every autonomous system that brings humans and automated machines into contact.
SAS Infographic:The coming of autonomous systems doesn’t just mean self-driving cars. Advances in artificial intelligence will soon mean that we have drones that can deliver medicines, crew-less ships that that can navigate safely through busy sea lanes, and all kinds of robots, from warehouse assistants, to search-and rescue robots, down to machines that can disassemble complex devices like smartphones in order to recycle the critical raw materials they contain. As long as these autonomous systems stay out of sight, or out of reach, they are readily accepted by people. The rapid and powerful movements of assembly-line robots can be a little ominous, but while these machines are at a distance or inside protective cages we are at ease. However, in the near future we’ll be interacting with “cobots” – robots intended to assist humans in a shared workspace. For this to happen smoothly we need to ensure that the cobots will never accidentally harm us. This question of safety when interacting with humans is paramount. No one worries about a factory full of autonomous machines that are assembling cars. But if these cars are self-driving, then the question of their safety is raised immediately. People lack trust in autonomous machines and are much less prepared to tolerate a mistake made by one. So even though the widespread introduction of autonomous vehicles would almost eliminate the more-than 20,000 deaths on European roads each year1, it will not happen until we can provide the assurance that these systems will be safe and perform as intended. And this is true for just about every autonomous system that brings humans and automated machines into contact.
Read more...
Blog
-

A series of wireless communication technology in agricultural vehicles. Part II: SmartMesh IP
-

A series of wireless communication technology in agricultural vehicles. Part I: IOLW
-

Graph search algorithms in pathfinding and collision avoidance
-

Introduction of the collision avoidance methods of autonomous ships
News
-

ESR12 – Finish secondment at MARIN
Over the past few months, ESR12 Tianlei Miao has been doing his ...
Read More » -

SAS ESR participation at MCAA 2021
-

SAS Workshop at DSN 2021
-

SAS participation in ET 2020
-

Raul (ESR1) wins SAFECOMP 2020 student grant